Java并发编程——AQS原理
AQS 全称是 Abstract Queued Synchronizer,翻译为抽象排队同步器。它是一套实现多线程同步功能的框架,由大名鼎鼎的 Doug Lea 操刀设计并开发实现的。AQS 在源码中被广泛使用,尤其是在 JUC包中,比如 ReentrantLock、Semaphore、CountDownLatch、ThreadPoolExecutor。
理解 AQS 对我们理解 JUC 中其他组件至关重要,并且在实际开发中也可以通过自定义 AQS 来实现各种需求场景。
框架概览
首先,我们来纵览一下整个AQS框架:
其中:
- 上图中有颜色的为Method,无颜色的为Attribution。
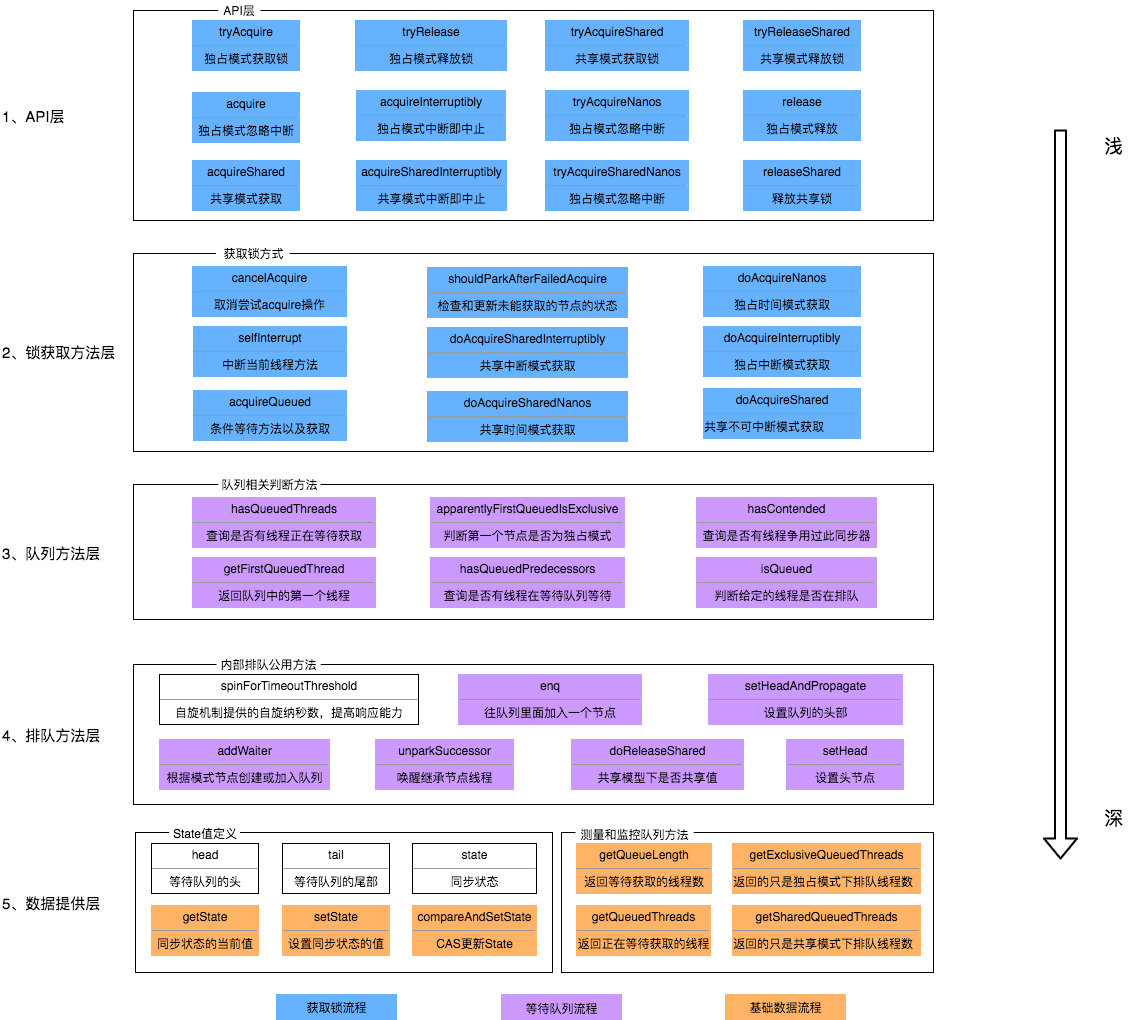
- 总的来说,AQS框架共分为五层,自上而下由浅入深,从AQS对外暴露的API到底层基础数据。
- 当有自定义同步器接入时,只需重写第一层所需要的部分方法即可,不需要关注底层具体的实现流程。当自定义同步器进行加锁或者解锁操作时,先经过第一层的API进入AQS内部方法,然后经过第二层进行锁的获取,接着对于获取锁失败的流程,进入第三层和第四层的等待队列处理,而这些处理方式均依赖于第五层的基础数据提供层。
下面我们会从整体到细节,从流程到方法逐一剖析AQS框架。
CLH同步队列
AQS核心思想是,如果被请求的共享资源空闲,那么就将当前请求资源的线程设置为有效的工作线程,将共享资源设置为锁定状态;如果共享资源被占用,就需要一定的阻塞等待唤醒机制来保证锁分配。
这个机制就是CLH同步队列,想要搞懂AQS原理我们需要了解一下这个数据结构。
CLH同步队列是一个FIFO双向队列,其名字源于Craig、Landin 和 Hagersten三位大佬的名字首字母,AQS依赖它来完成同步状态的管理。
当前线程如果获取同步状态失败时,AQS则会将当前线程和等待状态等信息构造成一个节点(Node)并将其加入到CLH同步队列,同时会阻塞当前线程,当同步状态释放时,会把首节点唤醒(公平锁),使其再次尝试获取同步状态。
这里说的节点,在源码中为Node类,其定义如下:
1 | |
几个重要的方法和属性:
| 方法和属性值 | 含义 |
|---|---|
| SHARED | 表示线程以共享的模式等待锁 |
| EXCLUSIVE | 表示线程正在以独占的方式等待锁 |
| waitStatus | 当前节点在队列中的状态 |
| thread | 表示处于该节点的线程 |
| prev | 前驱指针 |
| predecessor | 返回前驱节点,没有的话抛出npe |
| nextWaiter | 指向下一个处于CONDITION状态的节点(由于本篇文章不讲述Condition Queue队列,这个指针不多介绍) |
| next | 后继指针 |
其中SHARED和EXCLUSIVE表示锁的两种模式。
waitStatus表示节点在队列中的等待状态,它有几个枚举值:
- 0:当一个Node被初始化的时候的默认值,或者当前Node对应线程刚刚被唤醒
- 1(CANCELLED):由于超时或者中断,线程获取的锁的请求已经取消了,节点一旦被取消了就不会再改变状态,取消节点的线程不会再阻塞。
- -1(SIGNAL):表示此节点的后继节点已经处于阻塞状态,当此节点在释放或者取消时,需要唤醒后继节点。
- -2(CONDITION):表示节点在条件等待队列中,标记为CONDITION的节点会被移动到一个特殊的条件等待队列,直到条件时才会被重新移动到同步等待队列 。
- -3(PROPAGATE):当前线程处在SHARED情况下,该字段才会使用,表示应将releaseShared传播到其他节点。
入队
看过上面Node结点我们知道CLH是基于链表的实现,那么入队其实只需要尾节点即可,不过过程中由于涉及到多线程所以需要配合CAS操作使用。
具体的实现在addWaiter方法中:
1 | |
addWaiter方法首先尝试使用CAS将AQS中保存的tail,即队尾替换为当前需要入队的Node,如果成功则Node成功入队,如果失败说明其他线程也在调用addWaiter进行入队,则自旋不断尝试。
1 | |
对于tail为null的情况,说明此时CLH队列还未初始化,那么将会创建一个head来初始化队列。这里有个关键的地方在于,队列的Head是通过Node的无参构造创建的,这说明CLH中队头CLH是一个亚节点(Dummy Head),不具备其他意义。
对于tail不为null的情况,使用CAS替换tail引用来更新尾节点。
过程图如下:
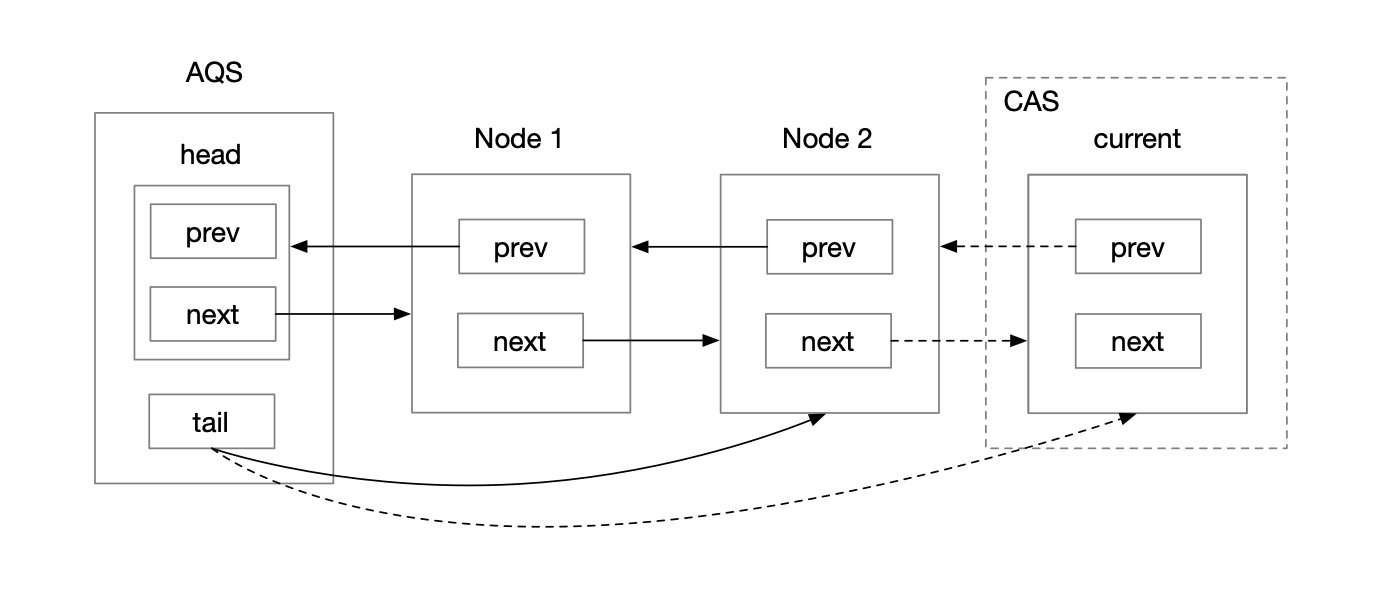
虚线表示此次入队所做操作,包括:
- 将current的prev指针指向Node2,即tail
- 将Node2的next指针指向current
- 将AQS中保存的tail指针指向current
出队
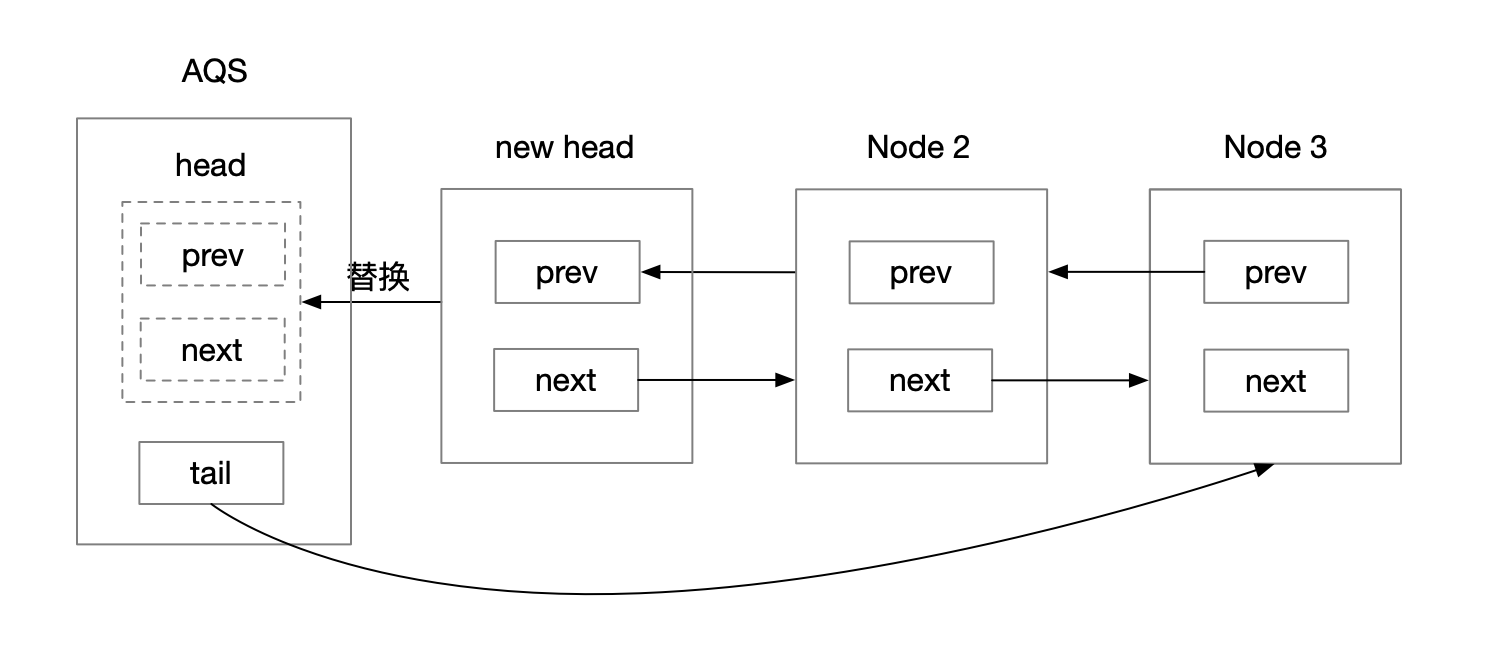
CLH同步队列遵循FIFO,首节点对应的线程释放同步状态后,将会唤醒它的后继节点,而后继节点将会在获取同步状态成功时将自己设置为首节点,这个过程非常简单,head执行该节点并断开原首节点的next和当前节点的prev即可,注意在这个过程是不需要使用CAS来保证的,因为只有一个线程能够成功获取到同步状态。
首先来看如何唤醒后继节点,在方法unparkSuccessor中:
1 | |
从代码中可知所谓后继节点并不一定就是head的next指针指向的节点,如果next指针指向的节点的waitStatus大于0,则会跳过。根据前面的小节,我们知道大于0其实就是CANCELLED状态,此状态表示该节点对应线程已经取消了此次锁的申请,对应的我们可以直接跳过此节点使其出队。
后继节点被唤醒后,需要更改指向将自己设置为首节点,对应代码在acquireQueued方法中:
1 | |
过程图如下:
同步状态的获取与释放
在了解数据结构后,接下来了解一下AQS的同步状态——State。AQS中维护了一个名为state的字段,意为同步状态,是由Volatile修饰的,用于展示当前临界资源的获锁情况。
AQS中提供了几个方法给子类来访问这个字段:
| 方法名 | 描述 |
|---|---|
| protected final int getState() | 获取State的值 |
| protected final void setState(int newState) | 设置State的值 |
| protected final boolean compareAndSetState(int expect, int update) | 使用CAS方式更新State |
仅仅只需要上面三个方法,我们就可以实现共享资源的两套模式:独占模式(EXCLUSIVE)和共享模式(SHARED)。
如果熟悉操作系统的话,可以将state类比为Linux中的信号量,信号量的值表示当前空闲的共享资源数量,而state的值则表示当前持有同步状态的线程数量。
那么对于独占模式,即互斥模式来说,state只会有两个可能的值:0和1。
其中0表示当前没有线程持有同步状态,即没有线程持有锁,这时如果线程A尝试获取锁,只需要使用CAS替换state的状态为1,如果成功则表示它拿到了这个互斥锁,失败表示存在锁竞争。
1表示有线程持有同步状态,即当前有线程持有这个互斥锁,这时如果未持有锁的线程尝试获取锁发现state为1,将直接进行入队。
下面我们就来看看独占模式和共享模式分别是如何实现的。
独占模式
独占模式表示同一时刻有且仅有一个线程能够持有同步状态,也就是我们常说的互斥模式。
独占式同步状态获取
AQS提供了acquire(int arg)模版方法为独占式获取同步状态。
该方法对中断不敏感,也就是说由于线程获取同步状态失败加入到CLH同步队列中,后续对线程进行中断操作时,线程不会从同步队列中移除。代码如下:
1 | |
此方法只有三行(准确的来说只有两行),但涉及到了三个方法,定义如下:
- tryAcquire:去尝试获取锁,获取成功则设置锁状态并返回true,否则返回false。此方法涉及到具体实现,因此由子类来完成,注意实现时必须要保证获取同步状态操作是线程安全的。
- addWaiter:此方法上一节介绍过,如果
tryAcquire返回false,表示获取同步状态失败,则调用该方法将当前线程加入到CLH同步队列尾部。 - acquireQueued:此方法上一节介绍过,当前线程在获取锁失败后会进行阻塞,不过不是立马阻塞,而是先设置前一个节点为
SIGNAL,再进行阻塞,知道前一个节点将其唤醒。 - selfInterrupt:产生一个中断。
其中逻辑主要在addWaiter和acquireQueued中,其中addWaiter在上一节已经详细介绍了,acquireQueued只介绍了替换头部的这部分,这里我们再来看下:
1 | |
在调用addWaiter之后执行此方法,假设此时Node的前驱节点不是Head,或者Node获取同步状态失败了,那么会调用shouldParkAfterFailedAcquire方法和parkAndCheckInterrupt方法。
shouldParkAfterFailedAcquire
1 | |
此方法主要做了以下工作:
如果前驱节点的状态为
SIGNAL,说明闹钟标志已设好,返回true表示当前节点可以阻塞了。如果前驱节点的状态为
CANCELLED,说明前驱节点本身不再等待了,需要跨越这些节点,然后找到一个有效节点,再把node和这个有效节点的前驱后继连接好。如果是其他情况,那么CAS尝试设置前驱节点为
SIGNAL。
可以看到此方法主要是要保证前驱节点设置好了SIGNAL状态,只要前驱节点已经为SIGNAL状态就会返回true,表示当前节点可以被阻塞了。
而shouldParkAfterFailedAcquire在死循环中调用,因此对于前驱不为head的情况,可以保证最终一定能设置前驱为SIGNAL成功。
当shouldParkAfterFailedAcquire返回了true时,调用parkAndCheckInterrupt阻塞线程。
parkAndCheckInterrupt
此方法将会阻塞当前线程,并且在唤醒后检测中断状态:
1 | |
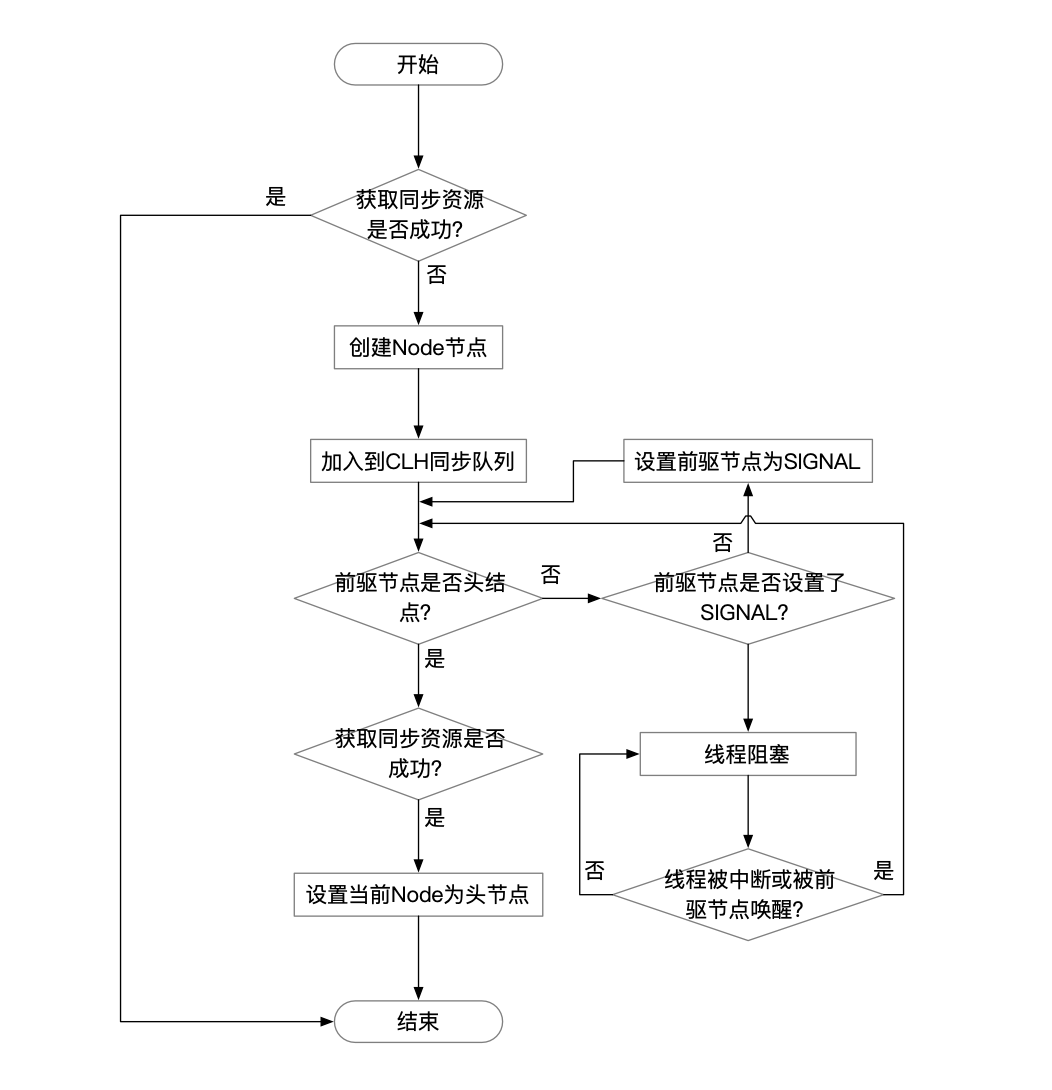
到这里整个acquire方法执行流程就分析完了,如下图所示:
注意:对于独占式同步状态的获取,AQS支持响应中断与超时检测,对应
acquireInterruptibly、doAcquireInterruptibly和tryAcquireNanos、doAcquireNanos方法,这些方法与上文介绍的流程大同小异,因此这里不再赘述。
独占式同步状态释放
当线程获取同步状态后,执行完相应逻辑后就需要释放同步状态。AQS提供了了release(int arg)方法释放同步状态:
1 | |
同样的,类似于tryAcquire,release方法中首先通过tryRelease方法来判断是否释放成功,tryRelease也是一个抽象方法需要子类实现。
释放成功后,会调用unparkSuccessor方法唤醒后继节点。unparkSuccessor方法在出队这一小节已经详细介绍过了,不再赘述。
共享模式
共享模式表示允许多个线程同时持有同步状态,我们常说的读写锁中的读锁就是这种模式。
共享式同步状态获取
AQS提供acquireShared方法共享式获取同步状态:
1 | |
从上面程序可以看出,方法首先是调用tryAcquireShared方法尝试获取同步状态,如果获取失败则调用doAcquireShared自旋方式获取同步状态,共享式获取同步状态的标志是返回 >= 0 的值表示获取成功。
tryAcquireShared同样是一个未实现的方法,需要由子类实现,不过对于这个方法的返回值需要重点注意下:
- 返回值小于0:表示获取共享同步状态失败
- 返回值等于0:表示获取共享同步状态成功,但没有剩余同步状态可以获取
- 返回值大于0:表示获取共享同步状态成功,并且还有”返回值“个同步状态资源可以获取,需要传播到队列的后继节点中
如何利用这个返回值呢,来看看doAcquireShared。
doAcquireShared
1 | |
此方法与上节独占式同步获取中acquireQueued十分类似,区别在于这里使用tryAcquireShared方法来获取共享同步状态,并且调用了setHeadAndPropagate方法来设置头节点。
setHeadAndPropagate由名字可知,其除了设置头节点外,还需要传播共享锁状态,来看看源码。
setHeadAndPropagate
1 | |
先来看两个入参:node代表的线程一定是当前线程,propagate则表示剩余可获取的共享同步状态。
方法中首先保存了旧头节点,同时设置了node为新的头节点。
第一个if条件判断逻辑较为复杂,我们来重点梳理一下:
propagate > 0:传入的propagate可能是0也可能是正整数,当大于0时表示需要传播共享锁,因此可以直接短路。h == null || h.waitStatus < 0:由于方法一开始就将head赋值给了h,因此这里h == null是不可能成立的。而h的waitStatus可能有两种情况:- h.waitStatus为0:这个情况表示某个线程释放了锁,或者在获取共享锁时传播给后继节点共享锁状态,将h的h.waitStatus更新为了0,具体实现在
doReleaseShared方法中,下一节会介绍。 - h.waitStatus为PROPAGATE:同样是
doReleaseShared中唤醒后继节点时将head的waitStatus更新为0,但又有其他线程执行了doReleaseShared,将waitStatus更新为了PROPAGATE。
- h.waitStatus为0:这个情况表示某个线程释放了锁,或者在获取共享锁时传播给后继节点共享锁状态,将h的h.waitStatus更新为了0,具体实现在
(h = head) == null || h.waitStatus < 0):判断新head(下称:node)是否为null或者h.waitStatus小于0。一般node不会为null,而node的waitStatus可能有多种情况:- node.waitStatus为0:后继节点刚好入队列,还没有走到
shouldParkAfterFailedAcquire中的修改前驱节点waitStatus的代码。 - node.waitStatus为PROPAGATE:上一个共享节点被唤醒后,成为新head,后继节点刚入队列,又有其他线程释放锁调用
doReleaseShared,node.waitStatus从0改为-3。 - node.waitStatus为SIGNAL:已经调用了
shouldParkAfterFailedAcquire,node.waitStatus从0或者PROPAGATE改为SIGNAL,可能阻塞,可能未阻塞。
- node.waitStatus为0:后继节点刚好入队列,还没有走到
可以看到由于共享锁的特殊性,相比于独占锁,这里更多的是要考虑其他线程可能会修改新/旧头节点的情况,逻辑较为复杂,了解即可。
上面多个条件只需满足一个即可if代码块中,当后继节点为共享状态时,调用doReleaseShared将共享状态传播给后继节点。
共享式同步状态释放
共享式同步状态释放逻辑在doReleaseShared方法中:
1 | |
为了保证线程安全,共享锁的释放操作同样需要自旋配合CAS来完成。
释放时同样需要判断当前head的waitStatus来确保成功:
- 当waitStatus为SIGNAL时:尝试更新head的waitStatus为0,成功则调用
unparkSuccessor唤醒后继节点,并且unparkSuccessor中会更新waitStatus为SIGNAL,失败表示有其他线程更改了waitStatus,重新循环 - 当waitStatus为0时:此状态说明有线程执行了
doReleaseShared并将waitStatus成功更新为0,但还未执行unparkSuccessor,或在unparkSuccessor更新waiStatus失败,此时当前线程刚好执行到doReleaseShared就会发现waitStatus为0。这种情况尝试更新waitStatus为PROPAGATE,失败将会继续循环。
当上面两个操作中有一个执行成功时,将会继续执行判断:
1 | |
当前head如果发生了改变,继续循环,没有发生改变则说明此次释放操作成功。
总结
本篇文章从数据结构到独占和共享锁的获取与释放过程简单分析了AQS框架的一些原理,当然这些只是冰山一角,实际上整个框架的设计非常巧妙,建议读者自行阅读一遍。
在了解了AQS的原理之后,我们就可以理解AQS为什么叫抽象排队同步器了,实际上这个名字起的非常巧妙,仅仅使用三个词就完美的诠释了它的特点:
- 抽象(Abstract):它是一套抽象实现的框架,需要子类继承来实现整个锁机制
- 排队(Queued):AQS中的核心数据结构为CLH队列,获取同步状态失败时,线程将会以队列中的节点的方式进行排队
- 同步器(Synchronizer):整个框架用于实现线程间同步机制
下一篇文章将会从ReentrantLock的实现来看AQS的应用。